Fichier:Regression elliptique distance algebrique donnees gander.svg
Aller à la navigation
Aller à la recherche

Taille de cet aperçu PNG pour ce fichier SVG : 452 × 364 pixels. Autres résolutions : 298 × 240 pixels | 596 × 480 pixels | 954 × 768 pixels | 1 272 × 1 024 pixels | 2 543 × 2 048 pixels.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fichier d’origine (Fichier SVG, nominalement de 452 × 364 pixels, taille : 21 kio)
{kind=link}
Description
| Description |
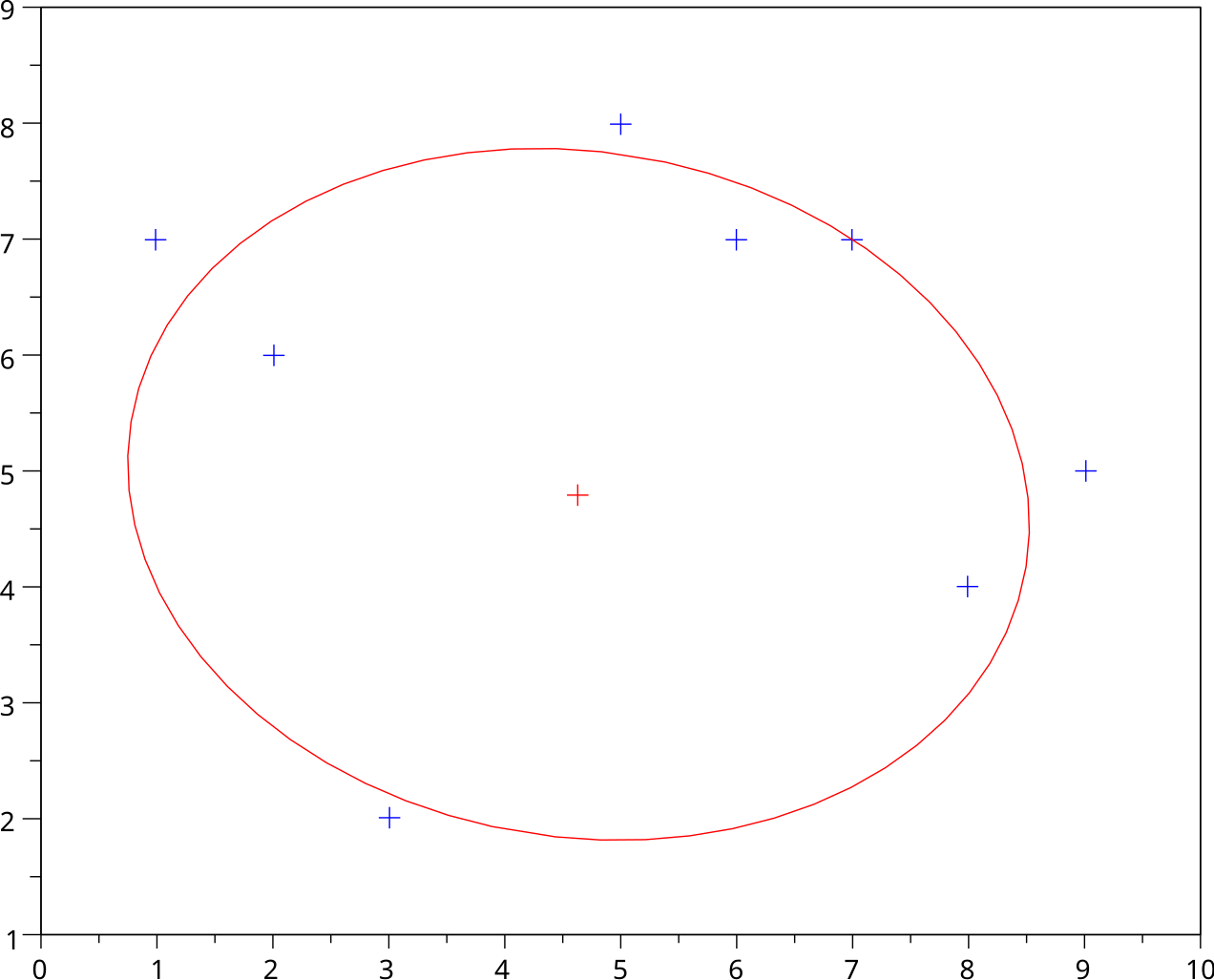
English: Ellipse fitting, using the method of the algebraic distance. Fitzgibbon algorithm (Halíř and Flusser 1998), with test data from Gander et al. 1994.
Français : Régression elliptique, méthode de la distance algébrique. Algorithme de Fitzgibbon, avec les données test de Gander et coll. 1994. |
| Date | |
| Source |
Travail personnel
|
| Auteur | Cdang |
Parameters of the ellipse:
- center: (4.64 ; 4.80);
- major semi-axis: a = 3.91;
- minor semi-axis: b = 2.96;
- tilt angle: φ = -9.21°.
Scilab source
 |
This media was created with Scilab, a free open-source software. Here is a listing of the Scilab source used to create this file. |
// **********
// Initialisation
// **********
clear;
// **********
// Données
// **********
X0 = [1, 2, 5, 7, 9, 6, 3, 8];
Y0 = [7, 6, 8, 7, 5, 7, 2, 4];
// **********
// Fonctions
// **********
function [a] = regression_elliptique(X, Y) // Fitzgibbon
// méthode de la distance algébrique
// X, Y : points expérimentaux, matrices colonnes réelles
// a : coefficients de la formule quadratique (matrice colonne réelle)
D = [X.*X, X.*Y, Y.*Y, X, Y, ones(X)]; // matrice de conception (design m.)
S = D'*D; // matrice de dispersion (scatter m.)
C = zeros(6,6);
C(1,3) = 2; C(2,2) = -1; C(3,1) = 2; // matrice de contrainte
[vecpropres, valpropres] = spec(inv(S)*C); // détermination du
// système propre
if imag(vecpropres) <> 0 then
error('Les vecteurs propres contiennent des valeurs complexes')
end
if imag(valpropres) <> 0 then
error('Les valeurs propres contiennent des valeurs complexes')
end
vecpropres = real(vecpropres); // complexes -> réels
valpropres = real(valpropres);
[PosLigne, PosColonne] = find((valpropres > 0 & ~isinf(valpropres)));
// recherche les indices des valeurs propres positives
a = vecpropres(:, PosLigne); // vecteur propre correspondant
endfunction
function [phi]=trouve_rotation(A)
// A : coefficients de la formule quadratique (matrice colonne réelle)
// phi : angle que fait un axe de l'ellipse avec x (radians)
delta = 1 - 1/(1 + (A(3) - A(1))^2/A(2)^2);
absphi = acos(sqrt((1 + sqrt(delta))/2));
signephi = sign(A(2)*(cos(absphi)^2 - sin(absphi)^2)/(A(1) - A(3)));
phi = signephi*absphi;
endfunction
function [x,y]=trouve_centre(A)
// A : coefficients de la formule quadratique (matrice colonne réelle)
// x, y : coordonées du centre de l'ellipse (réels)
delta = A(2)^2 - 4*A(1)*A(3);
x = (2*A(3)*A(4) - A(2)*A(5))/delta;
y = (2*A(1)*A(5) - A(2)*A(4))/delta;
endfunction
function [rx, ry]=trouve_rayons(a, phi, xc, yc)
// a : coefficients de la formule quadratique (matrice colonne réelle)
// phi : angle que fait un axe de l'ellipse avec x
// xc, yc : coordonnées du centre de l'ellipse
// rx, ry : rayons (grand et petit demi-grands axes) de l'ellipse
A = [a(1), a(2)/2 ; a(2)/2, a(3)];
Q = rotate([1,0;0,1], phi); // matrice de rotation
t = [xc;yc]; // matrice de translation
Abar = Q'*A*Q;
b = [a(4);a(5)];
bbar = (2*t'*A + b')*Q;
c = a(6);
cbar = t'*A*t + b'*t + c;
rx = sqrt(-cbar/Abar(1,1));
ry = sqrt(-cbar/Abar(2,2));
endfunction
function [] = trace_ellipse(xc, yc, a, b, phi)
// trace l'ellipse de centre (xc, yc)
// de rayons a et b et tournée de phi
pas = 0.1;
t = 0:pas:%pi/2;
X = a*cos(t);
Y = b*sin(t);
n = 4*size(X,'*');
XY1 = [X, -flipdim(X,2), -X, flipdim(X,2);...
Y, flipdim(Y,2), -Y, -flipdim(Y,2)];
XY = rotate(XY1, phi) + [xc*ones(1,n);yc*ones(1,n)];
xpoly(XY(1,:), XY(2,:));
endfunction
// **********
// Programme principal
// **********
// lecture des données
Xdef = X0';
Ydef = Y0';
// Régression
aopt = regression_elliptique(Xdef, Ydef);
// affichage des paramètres
disp(aopt)
phi = trouve_rotation(aopt);
phideg = phi*180/%pi;
[xc, yc] = trouve_centre(aopt);
[a, b] = trouve_rayons(aopt, phi, xc, yc);
disp('phi = '+string(phi)+' rad = '+string(phideg)+'°.');
disp('C('+string(xc)+' ; '+string(yc)+').');
disp('a = '+string(a)+' ; b = '+string(b)+'.');
// tracé
clf;
plot(Xdef, Ydef, 'b+')
isoview(0, 10, 1, 9);
plot(xc, yc, 'r+')
trace_ellipse(xc, yc, a, b, phi);
ell = gce();
ell.foreground = 5;
It is also possible to use the Halíř algorithm (split matrices). The algorithm is more stable, and the result is the same.
function [a] = regression_elliptique(X, Y) // Halir
// méthode de la distance algébrique
// X, Y : points expérimentaux, matrices colonnes réelles
// a : coefficients de la formule quadratique (matrice colonne réelle)
D1 = [X.*X, X.*Y, Y.*Y];
D2 = [X, Y, ones(X)];
// matrices de conception (design m.)
S1 = D1'*D1;
S2 = D1'*D2;
S3 = D2'*D2;
// matrices de dispersion (scatter m.)
T = -inv(S3)*S2';
N = S1+ S2*T;
M = [0.5*N(3, :) ; -N(2,:) ; 0.5*N(1, :)]; // mult par inv(C1) à gauche
// matrice de dispersion réduite
[vecpropres, valpropres] = spec(M);
vep = real(vecpropres);
// détermination du système propre
condition = 4*vep(1, :).*vep(3, :) - vep(2, :).^2;
// évaluation de a'Ca
a1 = vep(:, find(condition > 0));
a = [a1 ; T*a1]; // vecteur propre correspondant à la solution
endfunction
Conditions d’utilisation
Moi, en tant que détenteur des droits d’auteur sur cette œuvre, je la publie sous les licences suivantes :

|
Vous avez la permission de copier, distribuer et modifier ce document selon les termes de la GNU Free Documentation License version 1.2 ou toute version ultérieure publiée par la Free Software Foundation, sans sections inaltérables, sans texte de première page de couverture et sans texte de dernière page de couverture. Un exemplaire de la licence est inclus dans la section intitulée GNU Free Documentation License. |
Ce fichier est sous licence Creative Commons Attribution – Partage dans les Mêmes Conditions 3.0 Non Transposé, 2.5 Générique, 2.0 Générique et 1.0 Générique.
- Vous êtes libre :
- de partager – de copier, distribuer et transmettre cette œuvre
- d’adapter – de modifier cette œuvre
- Sous les conditions suivantes :
- paternité – Vous devez donner les informations appropriées concernant l'auteur, fournir un lien vers la licence et indiquer si des modifications ont été faites. Vous pouvez faire cela par tout moyen raisonnable, mais en aucune façon suggérant que l’auteur vous soutient ou approuve l’utilisation que vous en faites.
- partage à l’identique – Si vous modifiez, transformez ou vous basez sur cet élément, vous devez distribuer votre contribution sous une license identique ou compatible à celle de l’original.
Vous pouvez choisir l’une de ces licences.
Historique du fichier
Cliquer sur une date et heure pour voir le fichier tel qu'il était à ce moment-là.
| Date et heure | Vignette | Dimensions | Utilisateur | Commentaire | |
|---|---|---|---|---|---|
| actuel | 21 décembre 2012 à 11:02 | | 452 × 364 (21 kio) | wikimediacommons>Cdang | {{Information |Description ={{en|1=sign error in algorithm}} |Source ={{own}} |Author =Cdang |Date = |Permission = |other_versions = }} |
Utilisation du fichier
La page suivante utilise ce fichier :
{kind=link}